





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Willkommen bei tm3d.de
Endlich ist es soweit, die Homepage hat ein neues Design! Ich wünsche schon mal viel Spaß beim Stöbern! Ich hoffe es funktioniert jetzt auch auf Handys, Tablets und anderen kuriosen Geräten ganz gut.
- Bei den elektrischen und elektronischen Projekten gibt es jetzt vor allem Neues von der 1-Wire Simulation. Die habe ich komplett neu geschrieben. Der Algorithmus ist ein bisschen anders. Alle Grundfunktionen sind jetzt in Assembler geschrieben. Sie läuft sehr stabil und ist am Oszi jetzt kaum noch vom Original zu unterscheiden.
- Die Dienstleistung hat sich jetzt mehr auf elektronische Entwicklungsabreiten verlagert. Das hat sich einfach in den letzten Jahren so entwickelt, da ich inzwischen nicht nur für mich selber Elektronik entwickele sondern auch für einige Firmen.
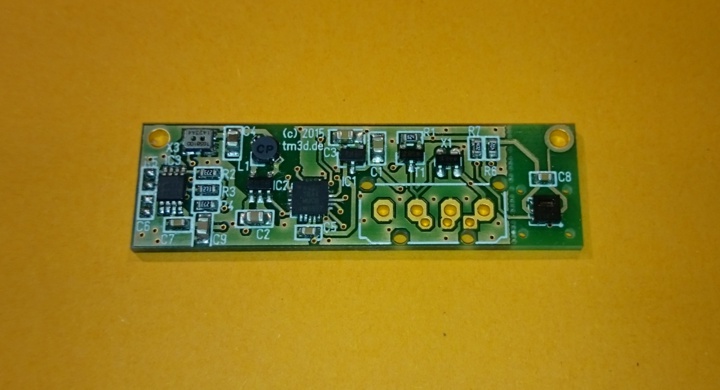
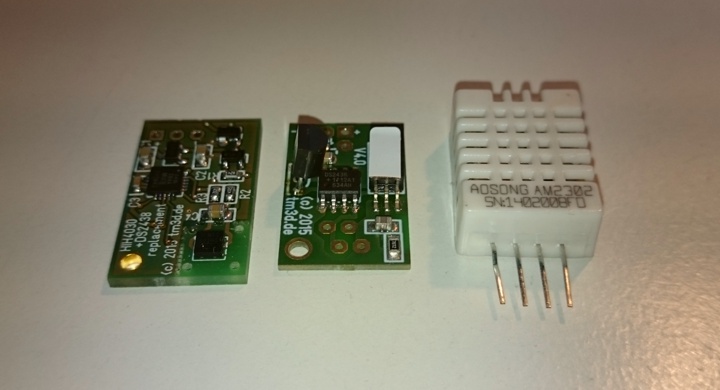
- Um der vielen Bestellungen von 1-Wire Feuchtesensoren und anderen Sachen besser gerecht zu werden gibt es jetzt auch einen Webshop auf der Seite.
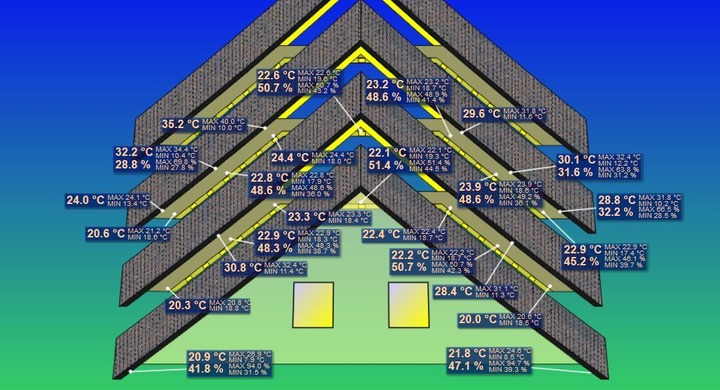
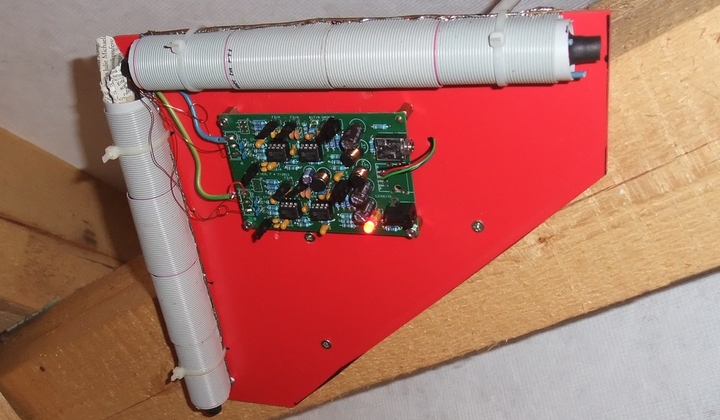
- Natürlich gibt es wieder die Blitzortung für alle Gewitterfans. Wenn mir sonst etwas Interessantes über das Wetter über den Weg läuft werde ich sicher einen Artikel darüber schreiben.
- Für alles weitere Spannende und Veröffentlichungswürdige gibt es jetzt die Kategorie: "Dies und Das". Ihr könnt schon gespannt sein was da so auftaucht.